Каракатица: устройство и принцип работы
1. Введение и руководство пользователя
1.1. Способы прошивки микроконтроллера
Наиболее распространенным способом программирования контроллеров является использование интерфейса JTAG. Несколько реже - SWD, еще реже всякие узкоспецифичные вещи вроде высоковольтного программирования или ISP. Но это если говорить о прошивке контроллера “перед продажей”, то есть пока плата находится у разработчика. А что делать, если надо обновить прошивку на устройстве, которое уже два года висит на столбе в трех тысячах километров где-то у заказчика? Не заставлять же его покупать программатор, изучать среду разработки, вскрывать корпус, … На такой случай в большинстве контроллеров предусмотрена возможность самопрограммирования: кусок кода помечается как загрузочный (bootloader), и может быть запущен путем какого-нибудь хитрого колдунства. Например, должна быть зажата определенная кнопка при старте, или пришла специальная команда, или воткнута определенная флешка. Тогда загрузчик запускается, считывает откуда-нибудь новую прошивку и записывает ее в основную память контроллера. Поскольку загрузочный код это код, то разнообразие способов получения прошивки ограничено только фантазией программиста (и в меньшей степени техническими ограничениями контроллера - какие интерфейсы доступны, хватает ли памяти). Плюс у каждого производителя контроллеров свое представление о тонкостях перехода в режим самопрограммирования. Поэтому рассматривать вообще все возможные варианты загрузчиков мы не будем.
Но вот один частный случай рассмотреть стоит - загрузчик, записанный производителем. В нашем случае, GigaDevice. Активируется он замыканием BOOT0 на лог.1, а BOOT1 на лог.0 с последующим рестартом контроллера. В результате этого контроллер начинает работать в роли программатора для самого себя. В случае GD32VF103 он может подключаться по USB (тогда для прошивки можно использовать например dfu-util) или по UART (тогда хорошо работает например stm32flash). Из этих двух вариантов более удобным оказывается, как ни странно, UART. Он и проще, и надежнее, и отлаживать через него потом можно. И пробросить в виртуальную машину, если что.
Вот только чтобы прошить контроллер через UART, надо провести целую кучу операций: выставить BOOT0 в лог.1; дернуть ресет; запустить утилиту прошивальщика; выставить BOOT0 в лог.0; снова дернуть ресет. Поначалу я это делал руками, и для первого личного знакомства с контроллерами такой способ более чем подходит. Но со временем захотелось его слегка автоматизировать. В переходниках USB-UART или COM-UART почти всегда можно найти “лишние” проводки - RTS, DSR, CTS и прочие. На самом деле они, конечно, не лишние, а служебные для связи с модемом. Но при программировании они не используются. Можно было попытаться воспользоваться ими. Но если уж делать программатор, стоит несколько заморочиться и сделать более удобную штуку.
1.2. Удаленная разработка
Одной из целей этого цикла статей была возможность дать всем желающим потыкать палочкой в реальный контроллер без необходимости его покупать. Проблема только в том, что контроллер всего один, посылать его каждому желающему по почте было бы неудобно, лучше сделать “палочку” дистанционно управляемой. Иначе говоря, программатор должен поддерживать не только собственно программирование и отладку, но и некоторые функции периферии, которую обычно подключают к контроллеру. И уже вот это реализовывать на какой-нибудь ft232 совсем неудобно. Ну хотя бы потому что и программирование, и отладочный вывод идут через один и тот же UART0, то есть постоянно надо переключаться между stm32flash и screen. Не говоря уж о работе с клавиатурой или аудиоустройством.
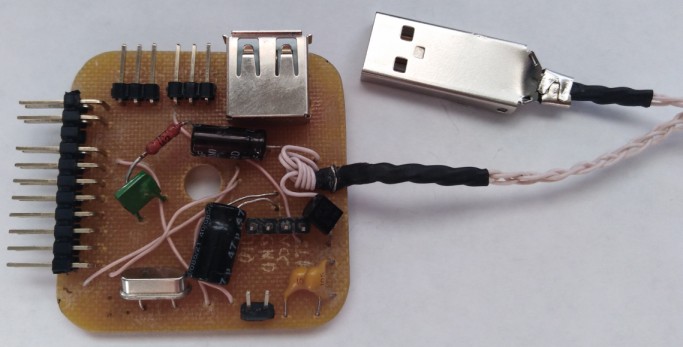
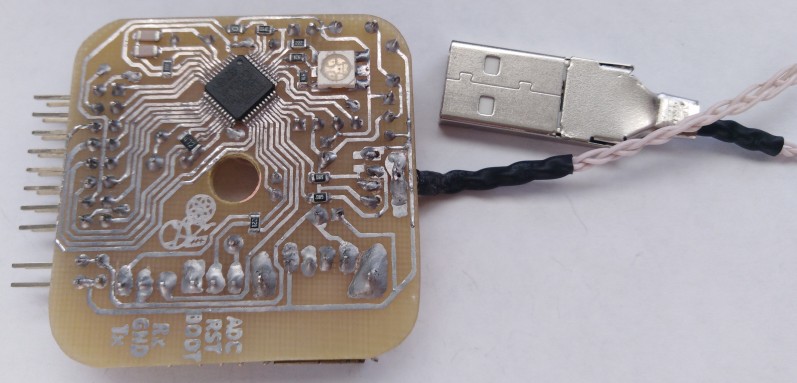
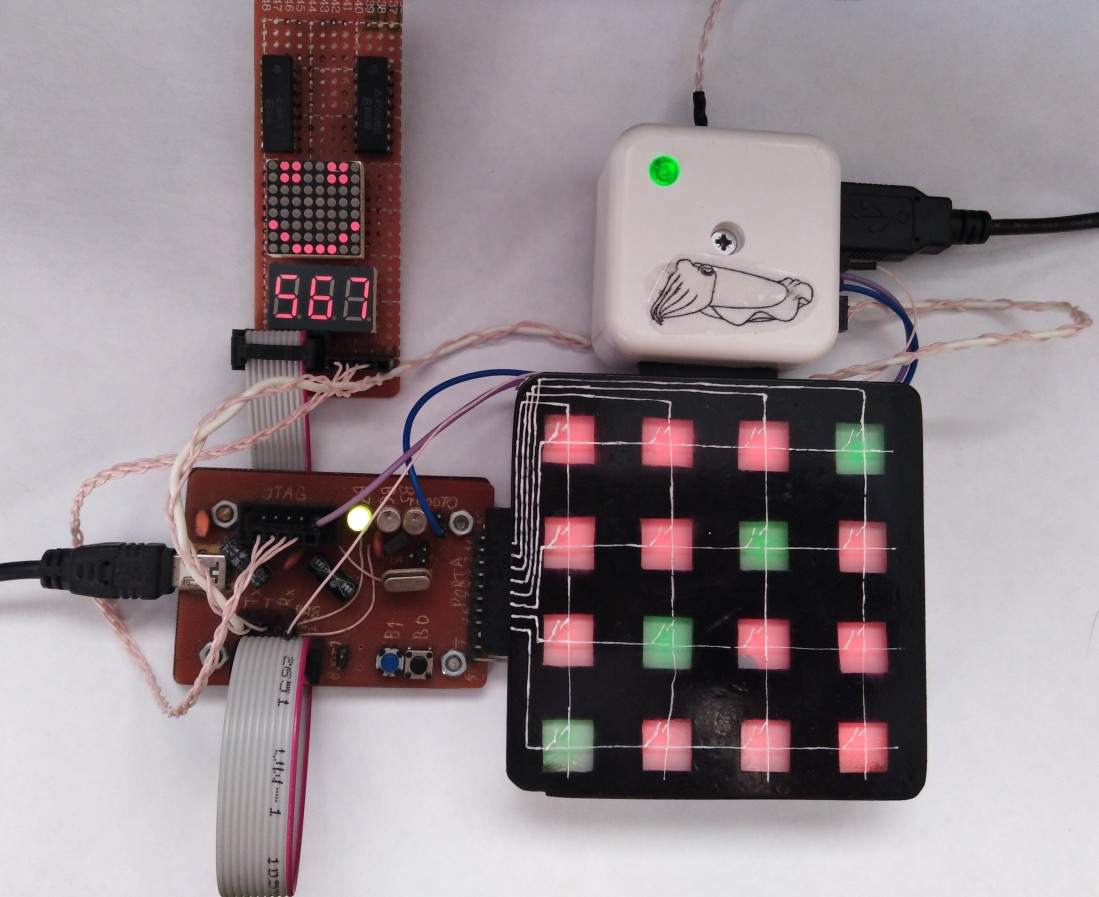
Поэтому сердцем программатора выбрана не какая-то специализированная микросхема, а самый что ни наесть обычный контроллер, который можно запрограммировать так, как нам нужно. В качестве контроллера я выбрал STM32F103 или STM32L151, потому что с ними я более знаком и уже успел более-менее разобраться с тамошним USB. Почему целых два контроллера? Просто они крайне похожи друг на друга и по периферии, и даже совместимы по выводам. Собственно, первые опыты я вообще проводил на отладочных платах, на которых с ними же знакомился. Именно поэтому Каракатица, мелькающая в роликах, выглядит почти неотличимо от подопытного контроллера на RISC-V: это и в самом деле одинаковые платки, только запаян в одном случае STM32F103, а в другом - GD32VF103. Сейчас же пришло время оформить наконец программатор как программатор, а не как набор костылей. Исторически так сложилось, что у программатора сразу появилось название Каракатица. Возможно, из-за того, что он выглядел как какое-то непонятное беспозвоночное с кучей щупалец проводков, опутывающих жертву.
1.3. Makefile и принцип программирования - отладки
Для того чтобы не переключаться между интерфейсами программирования и отладки, достаточно просто сделать два отдельных интерфейса /dev/tty_PROG_0 и /dev/tty_DBG_0tty_GD32_PROG_0 и tty_GD32_DBG_0 для GD32 и tty_CH32_PROG_0 и tty_CH32_DBG_0 для CH32, физически работающих с одной и той же парой Rx/Tx.
Управление линиями RST и BOOT (и еще USBR, но о ней позже) я решил повесить на тот же /dev/tty_PROG_0, но только при скорости 50 бод (для справки, при программировании скорость составляет 57600 бод, да еще с проверкой четности), а само управление - посылкой обычных текстовых символов: ‘r’, ‘R’ - ресет, ‘b’, ‘B’ - BOOT, ‘u’, ‘U’ - USBR. Прописная буква означает выставить активный уровень, строчная - снять.
Небольшое отступление на счет USBR: изначально предполагалась возможность отладки встроенного USB в этом контроллере. Но проблема в том, что если перевести контроллер в режим программирования, а USB не выдернуть, он будет пытаться прошиться именно через него. Поэтому если кто-то захочет воспользоваться функционалом USBR, надо соединять USB линии данных D+, D- подопытного RISC-V с компьютером не напрямую, а через реле. Вот за управление реле линия USBR и отвечает. В финальной версии Каракатицы этого функционала нет, поскольку стенд расположен не на отдельной выделенной машине, а в виртуалке. А у нее не так-то просто настроить проброс конкретного физического USB-порта. Вот пробросить конкретное устройство проблем никаких. Но из кода я работу с USBR не выпиливал.
Рассмотрим кусок makefile‘а, отвечающий за программирование:
uart_port="/dev/tty_GD32_PROG_0"
prog: $(frmname).bin
stty -F $(uart_port) 300
stty -F $(uart_port) 50
echo 'RBU' > $(uart_port)
echo 'rBU' > $(uart_port)
sleep 1
stm32flash $(uart_port) -w $(frmname).bin
stty -F $(uart_port) 50
echo 'RbU' > $(uart_port)
sleep 1
echo 'rbuz' > $(uart_port)
Сначала скорость выставляется в 300 и тут же в 50, чтобы Каракатица точно перешла в режим ногодрыга. Отказаться от выставления в 300 нельзя, поскольку неизвестно не была ли выставлена скорость 50 ранее. Если была, повторная установка не приведет к передаче команд, и Каракатица не сможет узнать, что программист хотел поменять ей режим.
Дальше посылается три байта: ‘R’, ‘B’, ‘U’ - сигнал Ресет, высокий уровень на BOOT0 и отключение USB. Далее посылается еще три байта: ‘r’, ‘B’, ‘U’ - отпустить Ресет, оставить BOOT0 в лог.1, оставить USB разомкнутым. Теперь контроллер находится в режиме загрузчика.
Вызовется stm32flash для прошивки.
После окончания скорость обмена снова выставляется в 50 бод, и посылается две последовательности: “RbU” и “rbuz” - послать сигнал сброса и тут же вернуть контроллер в режим выполнения обычной прошивки. Символ ‘z’ обозначает выход из режима программирования. Вообще-то, Каракатица и сама из него выйдет по таймауту, но зачем ждать 10 секунд?
Отдельно стоит сказать, как переключается режим программатора - отладчика. При начале общения с /dev/tty_PROG_0 в зависимости от скорости включается либо режим программатора (TTYM_PROGR в коде), либо ногодрыга (TTYM_CTRL) и запускается таймер обратного отсчета на 10 секунд. Но каждый принятый байт этот таймер сбрасывает, благодаря чему прошивка может длиться сколько угодно по времени. По истечении таймаута (или приеме байта ‘z’ в режиме ногодрыга) режим сбрасывается на рабочий (TTYM_NORMAL).
Каждый из этих режимов отображается на светодиодном индикаторе.
Важно в некоторых примерах я мог забыть поменять ‘RBU’ на ‘RbU’ в предпоследней команде, возможно из-за этого контроллер не всегда корректно стартовал.
1.4. Отладка: UART
Как было сказано раньше, интерфейсы программирования /dev/tty_PROG_0 и отладки /dev/tty_DBG_0 друг с другом практически не конфликтуют. Дополнительно к этому я предусмотрел /dev/tty_LOG_0, в который дублируется весь лог обмена с /dev/tty_DBG_0 как на чтение, так и на запись. Возможно, ему тоже найдется применение.
1.5. Отладка: клавиатура
Устройство матричной клавиатуры я описывал в соответствующей статье. Каждая кнопка представляет из себя электронный ключ, управляемый отдельным проводком. Размер матрицы 4х4 дает 16 ключей и соответственно 16 линий. Они подключаются к соответствующему разъему Каракатицы. На него удобнее всего оказалось вывести PA0 - PA7 и PB8 - PB15 напрямую, без всякой хитрой логики.
Ну а для управления этими 16 линиями я решил воспользоваться устройством типа HID (human interface device), которое примечательно тем, что не требует специальных драйверов и не слишком сложно в работе. Драйвер для визуализации его в виде красивых псевдографических кнопочек можно найти например здесь. А если он кого-то не устраивает, всегда можно переписать под свой вкус.
1.6. Отладка: микрофон
Ставить настоящий динамик и микрофон на такую платку я, конечно, не стал. Да это и не нужно, ведь USB-устройство может работать как микрофон. Пришлось, конечно, добавить немного обвязки (банальная RC-цепочка) и здорово повозиться с реализацией собственно микрофона: не такое уж это простое устройство, надо сказать! Но как бы то ни было, сейчас в состав Каракатицы входит и USB-микрофон тоже - он оцифровывает сигнал с соответствующего аналогового входа и отправляет в компьютер на частоте 44 кГц.
1.7. Настройка системы
Теоретически, ничего жестко завязанного на операционную систему здесь нет. Но под виндой я эту штуку не тестировал, и какие-то подводные камни найтись могут. Например, там, похоже, нет простого способа дать COM-портам человеко-читаемый псевдоним, да и управление скоростью (которое нужно для переключения в режим программирования) там также делается по-другому. В общем, я не умею программировать под виндой, поэтому и описывать не буду.
Самое главное в настройке системы - разрешить юзеру доступ к COM-портам. Делается это просто добавлением пользователя в группу dialout. Далее стоит назначить различным COM-портам псевдонимы. На самом деле, это не обязательно, можно обращаться к портам через /dev/serial/by-id/..., но через /dev/tty_X все же удобнее. Для этого заведем в /etc/udev/rules.d/ правило с каким-нибудь большим номером, например 98-usbserial.rules:
SUBSYSTEM=="tty", ATTRS{manufacturer}=="COKPOWEHEU" ENV{CONNECTED_vusb}="yes"
ENV{CONNECTED_vusb}=="yes", SUBSYSTEM=="tty", ATTRS{interface}=="?*", PROGRAM="/bin/bash -c \"ls /dev | grep tty_$attr{interface}_ | wc -l \"", SYMLINK+="tty_$attr{interface}_%c"
Здесь ищется устройство, у которого поле ‘manufacturer’ равно “COKPOWEHEU”, и для него заводится переменная окружения ENV{CONNECTED_vusb}="yes". В следующей строке анализируется каждое под-устройство для устройства, у которого эта переменная существует. Под-устройство должно иметь тип “tty” (переходник на COM-порт). Для такого под-устройства из дескриптора находится строковое описание интерфейса, и путем несложной шелльной магии подставляется в имя символьной ссылки.
Важно это правило я делал давным-давно и для себя. По-хорошему, его надо бы переписать. Скажем, название переменной CONNECTED_vusb не соответствует реальности.
В случае, если нужна работа с клавиатурой, стоит также разрешить юзеру доступ к устройству. Делается это опять через правила udev:
SUBSYSTEM=="usb", ATTRS{idVendor}=="16c0", ATTRS{idProduct}=="05df", GROUP="user", MODE="0660"
Важно idVendor, idProduct и manufacturer должны строго совпадать с теми, которые передает устройство. Посмотреть их можно командой lsusb (возможно, с ключом -v и от рута - зависит от системы). Если же возникло желание их поменять, добро пожаловать в файл usb_class.c, там описаны соответствующие константы.
2. Внутреннее устройство
2.1. Схема и плата
Разрабатывалось все это в KiCad, в репозитории лежат все исходники, в том числе прошивка для L151 и F103.
Важно: далее в тексте я постараюсь описать как можно упростить схему и прошивку, если кто-то захочет Каракатицу повторить, но не нуждается в определенном функционале вроде управления клавиатурой или микрофона.
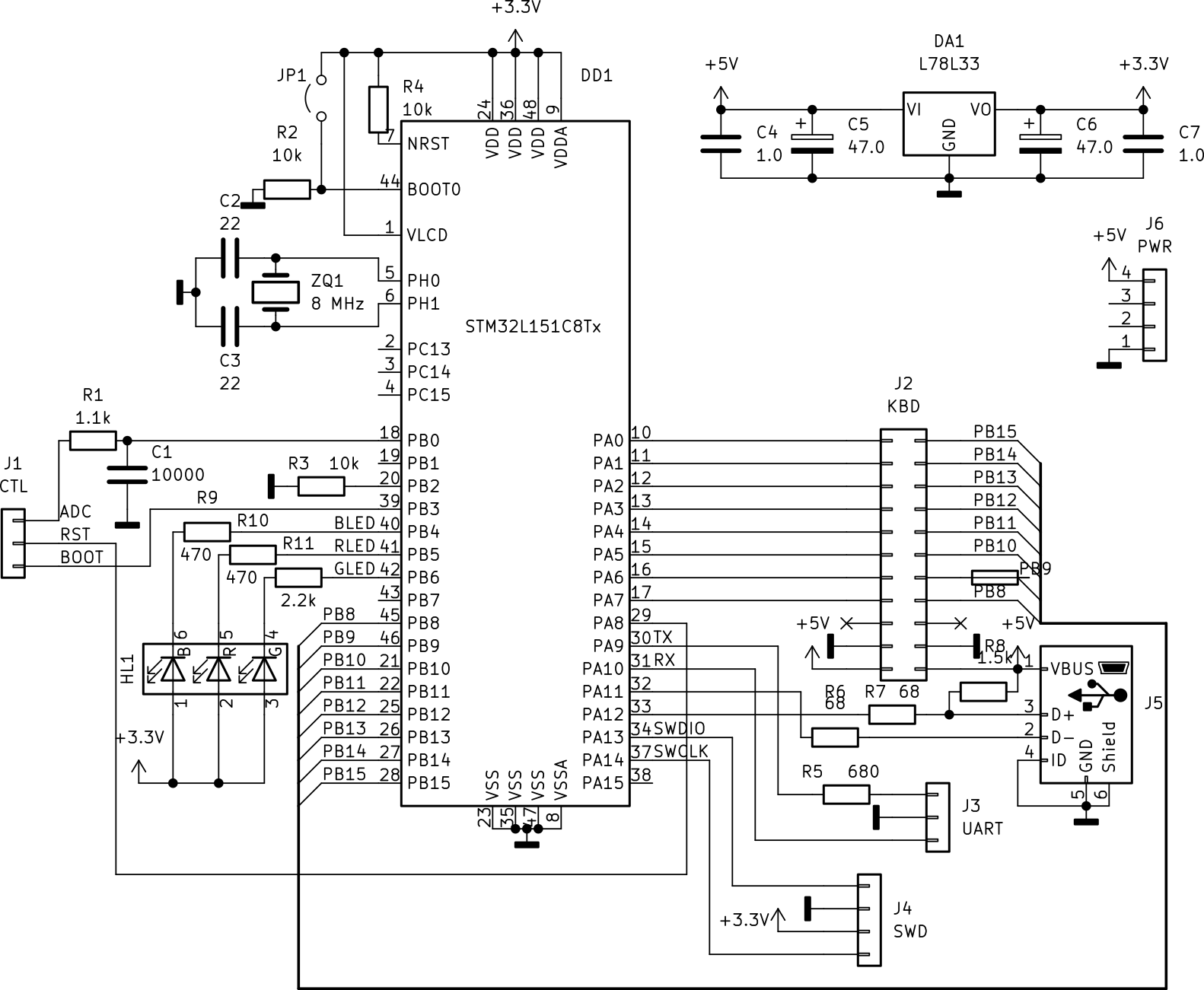
Электрическая схема. Также есть шаблон для ЛУТ в формате svg для печати.
{kind=link}
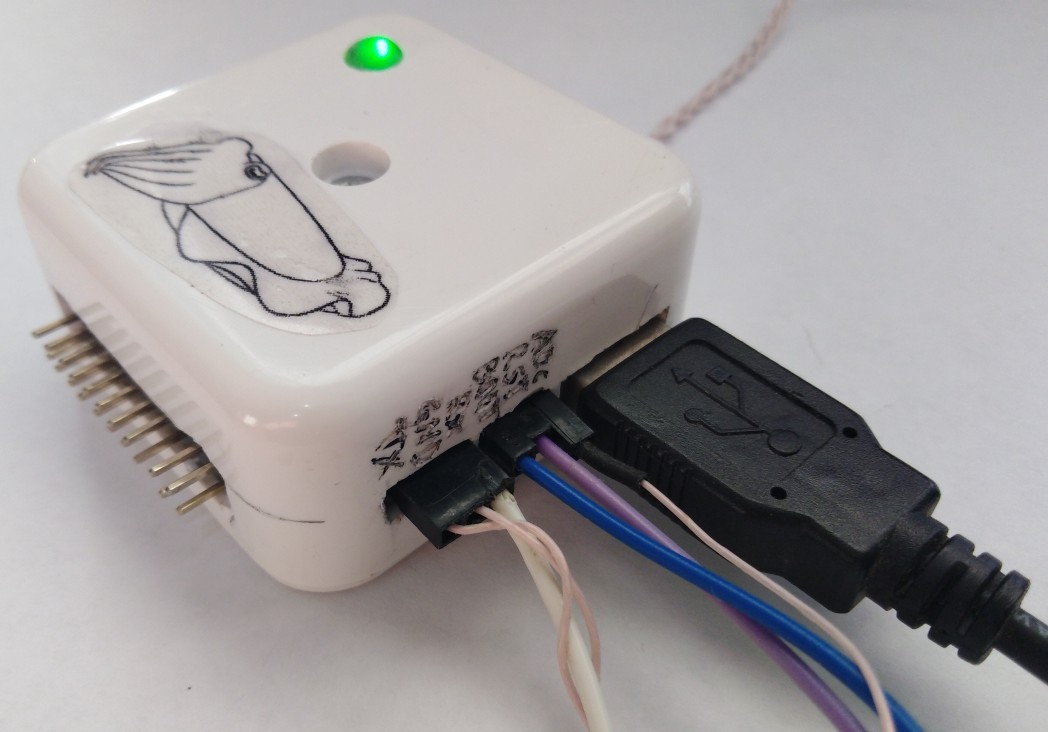
Корпус сделан из распределительной коробки - взял самую мелкую, которую только нашел, получилось менее чем 50х50х22 мм.
Обвязка более-менее страндартная: питание от USB через стабилизатор 3.3 В, выводы BOOT0, BOOT1 подтянуты к земле, на BOOT0 еще перемычка, чтобы контроллер можно было прошить через UART. Ресет подтянут к питанию чтобы не сбросился случайно. Номиналы резисторов здесь в обще-то произвольные, я напаял от 2.2к до 4.2к - лишь бы не слишком большие (иначе от такой подтяжки толку не будет) и не слишком маленькие (иначе при попытке замкнуть на другой потенциал, пойдет слишком большой ток).
На разъем питания “подопытного” подаются те же 5 В с входного разъема USB. Важно: если вы захотите все-таки воспользоваться линией USBR и отлаживать USB контроллера - для него надо предусмотреть собственный входной разъем, а линии D+, D- подключать через реле.
Предусмотрен кварц 8 МГц, но в крайнем случае можно попробовать и без него: если повезет, стабильности встроенного RC-генератора хватит и для USB, и для UART.
Линии UART1_RX, UART1_TX (у STM нумерация с единицы) идут на разъем UART, линии SWD - на разъем SWD, чтобы программировать сам программатор.
Последняя важная линия - АЦП, она должна идти именно на ту ножку, на которую выведен внутренний АЦП.
Линии RST, BOOT и светодиоды можно располагать как угодно.
С линиями управления клавиатурой сложнее, если будете их менять, придется влезть в файл class_hid.h и поправить работу с ними.
2.2. Конфигурация прошивки
Основная конфигурация находится в файле hardware.h - там можно переназначить управляющие линии и их полярность. Мало ли, захотите подключить светодиоды не с общим анодом, а с общим катодом (я-то так подключал только потому что дорожка +3.3 В была ближе, чем земляная, разводка проще получилась, не более того).
#define RLED B,5,0,GPIO_PP_VS
#define ADC_IN B,0,8,GPIO_ANA
Первая часть макроопределения - буква порта, вторая - номер. То есть RLED висит на PB5. Третья как раз отвечает за активный уровень (“включено”) или, в случае АЦП, за номер канала (ADC_IN это PB0, восьмой канал АЦП). Четвертая часть - режим работы. В данном случае push-pull, максимальная скорость (у L151 скорости задаются не в мегагерцах, а вот так).
Там же можно увидеть распределение USB: номера конечных точек, интерфейсов и всего остального.
Повторюсь какие USB-устройства в Каракатице реализованы:
- CDC_ACM (переходник на UART) для отладки, отображается на /dev/tty_DBG_0
- CDC_ACM для программирования /dev/tty_PROG_0
- CDC_ACM для логов /dev/tty_LOG_0
- USB_Audio, микрофон
- USB-HID для клавиатуры
Надо отметить, что такой комплект нужен только для собственно Каракатицы как средства удаленной отладки. Если кто-то захочет что-то подобное повторить для личного использования, достаточно будет оставить только два первых CDC_ACM - для программирования и отладки. Все эти клавиатуры и микрофоны проще, да и интереснее, трогать руками. Другое дело что без опыта влезать в чужой код, да еще на самописном USB, это то еще удовольствие.
2.3. Устройство библиотеки USB
Библиотека USB у меня самописная, примеры работы с ней я публиковал на Хабре. Но там (по крайней мере на момент написания этой статьи) нет ничего о составных устройствах. Уже есть. Главная, и чуть ли не единственная, хитрость это специальный дескриптор IAD, которым обрамляются составляющие дескрипторы устройств (лучше посмотреть прямо в usb_class.c). Разумеется, не надо забывать о нумерации интерфейсов и конечных точек, а также об ограничении на суммарный объем их буферов.
Общая работа с USB идет через usb_class.c: там обрабатываются запросы к устройству в целом (включая запрос дескрипторов) и оттуда же вызываются обработчики, специфичные для каждого под-устройства. Не считая обработчиков конечных точек: их каждое под-устройство регистрирует самостоятельно при инициализации:
char usb_class_ep0_in(config_pack_t *req, void **data, uint16_t *size){
if( hid_ep0_in( req, data, size ) )return 1;
if( mic_ep0_in( req, data, size ) )return 1;
if( programmer_ep0_in( req, data, size ) )return 1;
if( usb_log_ep0_in( req, data, size ) )return 1;
return 0;
}
void usb_class_init(){
hid_init();
mic_init();
programmer_init();
usb_log_init();
}
Отдельного внимания заслуживают запросы, передаваемые через нулевую точку (EP0): в отличие от остальных, они всегда имеют одну и ту же структуру, в которую входят в числе прочего номер запроса, и номер интерфейса.
Вот для примера часть обработчика class_hid.h:
char hid_ep0_in(config_pack_t *req, void **data, uint16_t *size){
if( req->bmRequestType == (USB_REQ_INTERFACE | 0x80) ){
if( req->bRequest == GET_DESCRIPTOR ){
if( req->wValue == HID_REPORT_DESCRIPTOR){
*data = (void**)&USB_HIDDescriptor;
*size = sizeof(USB_HIDDescriptor);
return 1;
}
}
}
...
return 0;
}
Здесь проверяется тип запроса, и, если это специфичный HID-запрос, он обрабатывается, после чего функция возвращает 1 - знак того, что запрос обработан. Если же это что-то другое, функция возвращает 0, и запрос передается следующим под-устройствам.
Другой пример, обработчик tty_LOG:
char usb_log_ep0_in(config_pack_t *req, void **data, uint16_t *size){
if( (req->bmRequestType & 0x7F) == (USB_REQ_CLASS | USB_REQ_INTERFACE) ){
if( req->bRequest == CDC_GET_LINE_CODING ){
if( req->wIndex == ifnum(interface_log) ){
*data = (void*)&log_cfg;
*size = sizeof(log_cfg);
return 1;
}
}
}
return 0;
}
Точно так же проверяется номер интерфейса (req->wIndex == ifnum(interface_log)) и тип запроса (req->bRequest == CDC_GET_LINE_CODING) и, если они соответствуют данному под-устройству, оно их обработает. Правда, данный запрос отвечает за изменение настроек COM-порта, и для виртуального tty_LOG он бесполезен…
2.4. Интерфейс программирования - отладки
Файлы programmer.c, programmer.h.
Это основная часть Каракатицы и редактировать ее вам, надеюсь, не придется. Общую логику я описал раньше. Существует три режима работы:
- TTYM_NORMAL. Нормальная работа, переходник USB-UART. Интерфейс UART1 работает с /dev/tty_DBG_0.
- TTYM_PROGR. Режим программирования. Интерфейс UART1 работает с /dev/tty_PROG_0. Вход в этот режим осуществляется просто по началу обмена, причем на любой скорости кроме 50 бод. Выход - по таймауту.
- TTYM_CTRL. Режим ногодрыга - управление линиями RST, BOOT, USBR. Интерфейс UART1 не используется, обмен через /dev/tty_PROG_0. Вход в этот режим осуществляется по началу обмена строго на скорости 50 бод. Выход - по изменению скорости или по таймауту. Наступление таймаута можно ускорить, послав на /dev/tty_PROG_0 символ ‘z’.
В режимах TTYM_NORMAL и TTYM_PROGR байты, принятые с USB отправляются на UART и наоборот. Байты, пришедшие на неактивный режим (например, если программатор в режиме TTYM_PROGR, а юзер что-то пишет в /dev/tty_DBG_0) читаются, а затем игнорируются. Это особенность моей библиотеки: просто так проигнорировать байты нельзя, надо обязательно считать.
Сам обмен осуществляется не по callback’ам, а по поллингу: готова ли конечная точка к обмену данными или нет.
2.5. Клавиатура
Файл class_hid.h
Работа с HID особого интереса не представляет (а для кого представляет - читайте статью на Хабре и другие источники). Здесь важнее, как эту штуку отключить, если она не нужна и как настроить если нужна.
Собственно передача 16-битной посылки в “клавиатурный” порт происходит в hid_ep0_out(). Посылка делится пополам, младшая половина отправляется в PA0-PA7, а старшая в PB8-PB15. Если вы хотите назначить клавиатуру на другие выводы, придется этот момент переписывать. И еще придется переписывать инициализацию этих ног в hid_init().
Если это под-устройство вам не нужно, достаточно просто закомментировать работу с GPIO.
Также через HID можно отправлять отладочную информацию обратно в компьютер. Делается это в hid_ep0_in() тем же способом, которым передается 2 байта данных в клавиатуру. Правда, чтобы эту информацию прочитать, придется доработать утилиту работы с HID.
2.6. Микрофон
Файл class_mic.h
Общий принцип также описан на Хабре, но есть и тонкости, связанные с АЦП. Самое сложное и неудобное для меня оказалось подстроить частоту опроса АЦП под запросы с USB. Запуск преобразования настроен на событие таймера TIM2, а по завершению вызывается прерывание АЦП. В нем считанное значение фильтруется и помещается в буфер. Также увеличивается счетчик. В прерывании по SOF от USB (оно генерируется каждую миллисекунду) количество считанных значений сравнивается с ожидаемым, и в зависимости от этого делитель таймера увеличивается или уменьшается.
Наверняка моя реализация далеко не самая удачная, но в целом она все же работает.
Второй сложный момент - собственно работа с АЦП: этот модуль в F103 и L151 сильно отличается.
Если это под-устройство вам не нужно, достаточно его не использовать. При желании можно вообще закомментировать все, что связано с АЦП и таймером, а в конечную точку отправлять один и тот же массив нулей.
3. Каракатица на минималках
Я надеюсь, что эта реализация (красивая и с корпусом) так и будет работать в роли удаленного программатора-отладчика. Но сам я не собираюсь забрасывать контроллеры на RISC-V, то есть мне нужен под рукой еще один программатор, пусть и не такой навороченный.
Для этого отлично подойдет любая отладочная плата на той же STM32F103 или STM32L151, благо они у меня есть. Единственное, что от такой платы требуется - чтобы был выведен UART1 и какие-нибудь две линии под RST и BOOT. Ну можно еще под USBR. Чтобы накинуть туда проводки, и подключить к контроллеру - в общем, ровно то, что я делал при записи видеороликов. Как отключить выводы клавиатуры я уже описал, как переназначить управляющие линии на любые порты тоже, останется пересобрать прошивку и пользоваться.
Лично для себя я пользуюсь вот такой прошивкой: те же два UART для программирования и отладки, управление BOOT0, RST. Плюс флешка со шпаргалками что куда подключено. Довольно удобно получилось.
Заключение
Надеюсь, я сумел в общих чертах описать что же такое Каракатица, для чего она нужна, как работает и как ее воспроизвести в домашних условиях.
